Die KFZ-Mechatroniker beschäftigen sich in der 12. Jahrgangsstufe mit Fahrassistenz- und Komfortsystemen. Neben Airbag und Gurtstraffer werden auch Systeme besprochen, die zum einen den Fahrkomfort verbessern und zum anderen den Fahrer dabei unterstützen, Unfälle zu vermeiden.
Ein großes Thema in der Fachpresse sind aktuell selbstfahrende Autos. Aber schon jetzt sind in den Fahrzeugen verschiedene Geräte verbaut, die selbstständig im Straßenverkehr agieren. Diese können in kürzerer Zeit eine Gefahrensituation erfassen und entsprechen reagieren.
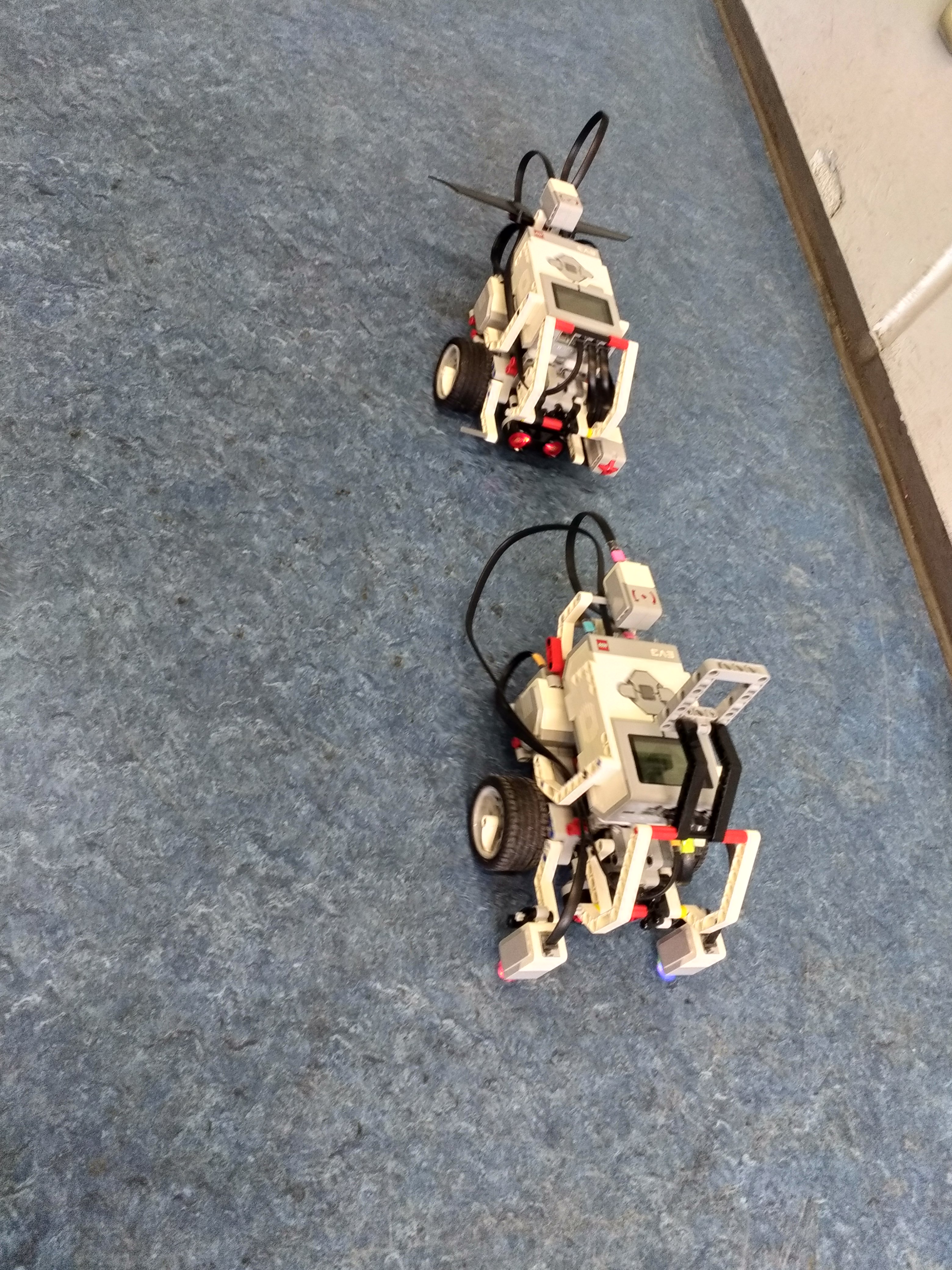
Diese Systeme entfalten ihr volles Potential erst auf der Straße bei erhöhtem Verkehrsaufkommen. Da es schlecht möglich ist, das Klassenzimmer in ein Fahrzeug zu verlegen, kommen bei uns Lego-Mindstorm-Roboter zum Einsatz, die uns von den Eckert Schulen gesponsert wurden.
So wird beispielsweise die Funktion eines Spurhalteassistenten (Lane Assist) dadurch realisiert, dass ein Fahrzeug mit zwei Farbsensoren, je einer links und einer rechts, ausgestattet wird, um Fahrbahnmarkierung zu erfassen. Auf dem Boden werden mit weißen Blättern Markierungen angebracht, die den potentiellen Straßenverlauf darstellen. Das Fahrzeug fährt solange geradeaus, bis die Straße einen Knick macht. Dies wird durch einen der beiden Farbsensoren, die auf die Farbe Weiß justiert sind, erfasst. Das Gefährt lenkt entsprechend gegen, bis die Sensoren kein weiß mehr erfassen, dann fährt das Fahrzeug wieder geradeaus.
Auf ähnliche Weise kann den Schülern die Funktion von Adaptive Cruise Control nahegebracht werden. Die Idee dahinter ist, dass ein Fahrzeug auf der Autobahn einen gewissen Abstand zum vorausfahrenden Fahrzeug hält und dies durch Beschleunigen und Bremsen selbstständig reguliert. Der Lego-Roboter wird dazu zunächst mit einem Ultraschallsensor ausgestattet, der so justiert wird, dass er zu einem vorausfahrenden Fahrzeug 50cm Abstand hält. Der erste Roboter fährt per Fernsteuerung geradeaus, der zweite Roboter folgt im Abstand von 50cm. Beschleunigt das erste Fahrzeug, beschleunigt auch das zweite Fahrzeug, bremst das erste Fahrzeug oder bleibt gar stehen, bremst auch das zweite Fahrzeug bis zum Stillstand ab und hält dadurch ständig den Abstand.
Denkbar wäre für ein weiteres Projekt die Kombination der beiden Systeme, wodurch ein vorausfahrendes Fahrzeug mit Spurhalteassistent der Fahrbahn selbstständig folgt. Ein weiteres Fahrzeug folgt mittels Adaptive Cruise Control. Durch einen eingebauten Spurhalteassistenten kann ebenfalls der Fahrbahnverlauf erfasst werden und so dem vorausfahrenden Fahrzeug gefolgt werden.
Gei, 23.05.19